
Elektronikindo.com – √ Skema Rangkaian IC L293D Untuk Driver Motor DC. IC L293D adalah salah satu komponen yang sering digunakan sebagai driver motor DC dalam berbagai aplikasi elektronika, terutama pada sistem robotik dan otomasi. Kemampuannya untuk mengendalikan arah putaran motor serta mengatur kecepatan melalui sinyal PWM menjadikan IC ini sangat populer di kalangan hobiis dan profesional. Dengan ukuran yang ringkas dan kemudahan implementasi, L293D memungkinkan pengendalian motor secara efisien tanpa memerlukan rangkaian tambahan yang kompleks.
Dalam artikel ini, kita akan membahas skema rangkaian IC L293D yang dirancang khusus untuk mengontrol motor DC. Pembahasan mencakup konfigurasi pin, cara kerja IC, serta contoh penerapan dalam proyek praktis. Pengetahuan ini tidak hanya membantu memahami prinsip kerja IC L293D, tetapi juga memberikan dasar yang kuat untuk merancang sistem kontrol motor yang kalianl dan fleksibel.
Kegunaan Driver Motor DC
Kalau ada yang bertanya, apa saja fungsi driver motor dalam mengontrol motor? Sejauh yang saya tahu, ada tiga hal utama:
1. Mengontrol Motor Berputar Searah Jarum Jam
Driver motor memungkinkan motor DC berputar dalam arah searah jarum jam, yang biasa disebut sebagai forward motion atau gerakan maju. Fungsi ini sering digunakan pada aplikasi seperti robot yang bergerak maju, conveyor belt yang mengangkut barang ke depan, atau perangkat lain yang memerlukan rotasi dengan arah tertentu. Kemampuan ini diperoleh dengan mengatur polaritas tegangan pada terminal motor sehingga menghasilkan arah putaran yang diinginkan.
2. Mengontrol Motor Berputar Berlawanan Jarum Jam
Selain menggerakkan motor maju, driver motor juga dapat mengatur agar motor berputar berlawanan arah jarum jam, atau yang dikenal sebagai reverse motion. Fungsi ini memungkinkan sistem untuk menggerakkan motor dalam arah mundur, seperti pada kendaraan remote control saat melakukan manuver balik atau robot yang membutuhkan gerakan fleksibel dalam dua arah. Dengan membalik polaritas tegangan yang diberikan, driver motor mengubah arah aliran arus listrik pada motor, menghasilkan putaran ke arah sebaliknya.
3. Mengontrol Kecepatan Putar Motor
Driver motor tidak hanya mengontrol arah putaran, tetapi juga kecepatan rotasi motor DC. Pengendalian kecepatan biasanya dilakukan menggunakan teknik modulasi lebar pulsa (Pulse Width Modulation atau PWM). Dengan mengatur durasi pulsa tegangan tinggi dan rendah yang dikirim ke motor, kecepatan putaran dapat disesuaikan sesuai kebutuhan, mulai dari perlahan hingga maksimal. Fungsi ini sangat penting dalam aplikasi seperti kendaraan listrik kecil, alat pengaduk otomatis, atau robot yang memerlukan gerakan dengan kecepatan variabel untuk efisiensi dan presisi.
Spesifikasi Driver L239D

Spesifikasi Driver L293D yang perlu diketahui :
- Supply Voltage (Vs): 0V – 36V
Tegangan ini merupakan sumber daya utama untuk motor yang akan dikendalikan. Dengan rentang tegangan yang lebar, IC L293D dapat digunakan untuk mengontrol motor DC dengan berbagai spesifikasi tegangan, mulai dari motor berdaya rendah hingga yang memerlukan tegangan hingga 36V. - Logic Supply Voltage (Vss): 5V
Tegangan ini merupakan sumber daya untuk bagian logika IC, yang biasanya berasal dari mikrokontroler seperti Arduino atau Raspberry Pi. Tegangan 5V adalah stkalianr untuk logika digital, sehingga IC ini mudah diintegrasikan dengan berbagai perangkat kontrol. - Max Current Output (Io): 1,2A
IC L293D mampu mengalirkan arus maksimum 1,2A ke motor. Ini cukup untuk menggerakkan motor DC berukuran kecil hingga menengah yang umum digunakan dalam proyek robotik atau otomasi sederhana. - Input Voltage (Vi): -0,3V hingga 1,5V (LOW) dan 2,3V hingga 5V (HIGH)
Rentang tegangan ini menentukan level logika yang dikenali oleh IC untuk sinyal masukan. Tegangan antara -0,3V hingga 1,5V akan dianggap sebagai logika LOW, sementara tegangan antara 2,3V hingga 5V akan dianggap sebagai logika HIGH. Rentang ini memastikan IC dapat dioperasikan dengan sinyal kontrol dari berbagai jenis mikrokontroler. - Enable Voltage (Ven): -0,3V hingga 1,5V (LOW) dan 2,3V hingga 5V (HIGH)
Tegangan ini mengontrol fungsi enable pada IC. Jika tegangan enable berada dalam rentang LOW (-0,3V hingga 1,5V), motor akan dinonaktifkan. Sebaliknya, jika tegangan berada dalam rentang HIGH (2,3V hingga 5V), motor akan aktif dan merespons sinyal masukan.
Dengan memahami spesifikasi ini, kalian dapat memastikan bahwa IC L293D digunakan dalam kondisi yang sesuai, sehingga performa optimal dan daya tahan IC dapat terjaga. Spesifikasi ini juga memudahkan dalam memilih motor yang kompatibel dengan driver ini untuk berbagai aplikasi.
Prinsip Kerja Driver Motor DC
Prinsip kerja driver motor menggunakan IC L293D adalah sebagai berikut: Pin EN1 berfungsi untuk mengaktifkan (enable) motor 1, yang dapat digunakan untuk menyalakan atau mematikan motor (ON/OFF). Biasanya, pin EN1 dihubungkan dengan sinyal PWM untuk mengontrol kecepatan motor. Sedangkan, Pin EN2 memiliki fungsi yang sama dengan EN1, tetapi digunakan untuk mengontrol motor DC 2.
Adapun pengaturan arah putaran motor dapat dilihat pada tabel berikut:
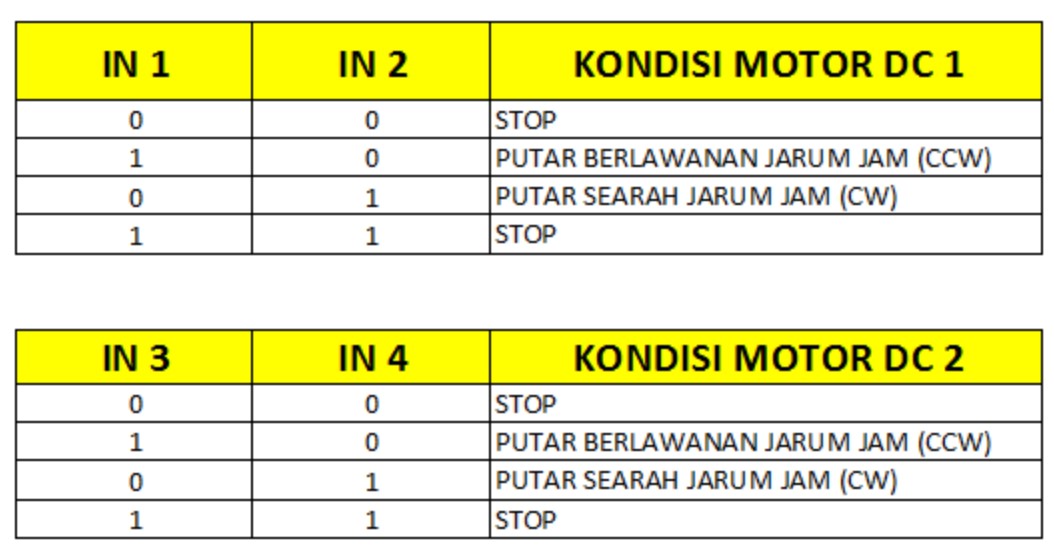
Jika IN1 diberikan logika 1 dan IN2 diberikan logika 0, motor A akan berputar berlawanan arah jarum jam. Sebaliknya, jika IN1 diberikan logika 0 dan IN2 diberikan logika 1, motor A akan berputar searah jarum jam. Namun, jika kedua input IN1 dan IN2 diberikan logika yang sama (baik 1 maupun 0), motor A akan berhenti bergerak, yang dikenal sebagai pengereman cepat (braking). Hal yang sama berlaku untuk motor B, dengan menggunakan input IN3 dan IN4.
Untuk mengatur kecepatan motor, digunakan sinyal PWM (Pulse Width Modulation) pada pin enable 1 (pin 1) untuk motor A dan pin enable 2 (pin 9) untuk motor B. Dengan mengontrol durasi pulsa PWM, kecepatan putaran motor dapat diatur sesuai kebutuhan.
Skema Rangkaian
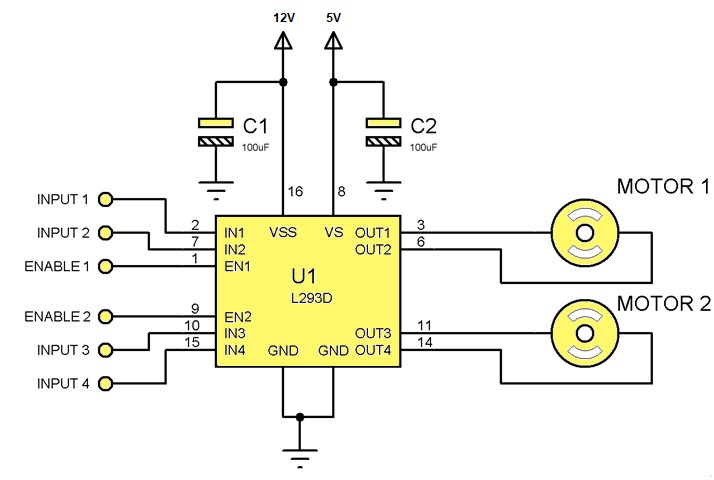
Cara kerja rangkaian
Cara Kerja Rangkaian Driver Motor Menggunakan IC L293D:
- IC L293D akan merespons sinyal input 1 dan input 2 ketika pin Enable 1 diberi logika HIGH. Jika Enable 1 diberikan logika LOW, maka Motor 1 tidak akan berputar, terlepas dari kondisi logika pada input lainnya.
- Ketika input 1 dan input 2 diberikan logika yang berbeda (misalnya, satu LOW dan satu HIGH), Motor 1 akan mulai berputar sesuai arah yang ditentukan oleh kombinasi logika tersebut.
- Jika logika pada input 1 dan input 2 dibalik (dari LOW-HIGH menjadi HIGH-LOW, atau sebaliknya), maka Motor 1 akan berputar berlawanan arah dari putaran sebelumnya.
- IC L293D juga akan merespons sinyal input 3 dan input 4 ketika pin Enable 2 diberi logika HIGH. Jika Enable 2 diberikan logika LOW, maka Motor 2 tidak akan berputar.
- Sama seperti Motor 1, ketika input 3 dan input 4 diberikan logika yang berbeda (LOW dan HIGH, atau sebaliknya), Motor 2 akan mulai berputar.
- Jika logika pada input 3 dan input 4 dibalik, Motor 2 akan berputar ke arah yang berlawanan dari sebelumnya.
- Agar motor dapat berputar, syaratnya adalah logika pada kedua input harus berlawanan (LOW-HIGH atau HIGH-LOW). Jika kedua input memiliki logika yang sama (LOW-LOW atau HIGH-HIGH), maka motor tidak akan berputar, dan kondisi ini dikenal sebagai pengereman cepat (braking).
- Putaran motor searah jarum jam disebut Clockwise (CW), sedangkan putaran yang berlawanan arah jarum jam disebut Counterclockwise (CCW).
Penerapan dan Kelebihan IC L293D
IC L293D sangat cocok untuk mengendalikan berbagai jenis motor DC dengan spesifikasi daya kecil hingga 1A per kanal. Hal ini menjadikannya ideal untuk digunakan dalam proyek berbasis mikrokontroler seperti Arduino atau Raspberry Pi. Rangkaian driver ini banyak diaplikasikan pada proyek robotik sederhana, seperti robot line follower atau robot pemadam api mini, karena kemampuannya yang kalianl dan kemudahan integrasi dengan sistem kontrol.
BACA JUGA :
- √ Skema Rangkaian Lampu Emergency Otomatis Saat Listrik Padam
- √ Skema Rangkaian Power Supply Variable LM 317 3A
- √ Skema Rangkaian Power Supply Regulator 12V 1A CT
- √ Skema Rangkaian Power Supply Regulator 12V 1A CT
Penutup
IC L293D merupakan solusi praktis dan efisien untuk mengendalikan motor DC dalam berbagai proyek elektronika. Dengan kemampuan mengatur arah dan kecepatan putaran motor, IC ini memberikan fleksibilitas yang tinggi, terutama pada aplikasi robotik dan otomasi.
Skema rangkaian yang telah dibahas dalam artikel ini diharapkan dapat membantu kalian memahami prinsip kerja IC L293D dan cara mengimplementasikannya dalam sistem kontrol motor.
Dengan memanfaatkan keunggulan IC L293D, kalian dapat merancang sistem kontrol motor yang sederhana namun kalianl. Mulailah dengan eksperimen kecil, seperti membuat robot line follower atau alat otomatisasi sederhana, untuk mengasah keterampilan kalian.
Semoga informasi dalam artikel elektronikindo.com ini dapat menjadi inspirasi bagi kalian dalam mengembangkan berbagai proyek kreatif dan inovatif di masa mendatang!




{kind=link}